Auto load Universal-Robots program.
Notice that the robot might start automatically and therefore make sure a proper risk assessment is conducted.
Application Description:
Load and start a program automatically.
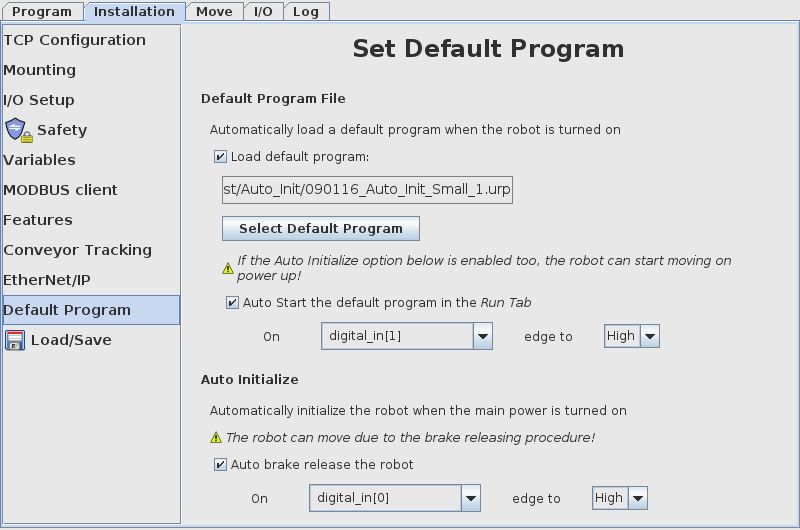
To Auto Initialize and Load and Start a User program there is the Default program menu. In this example below is defined a user program to load – and then defined an Input to be used for Auto Initialize – and then defined an input to be used for starting the program.
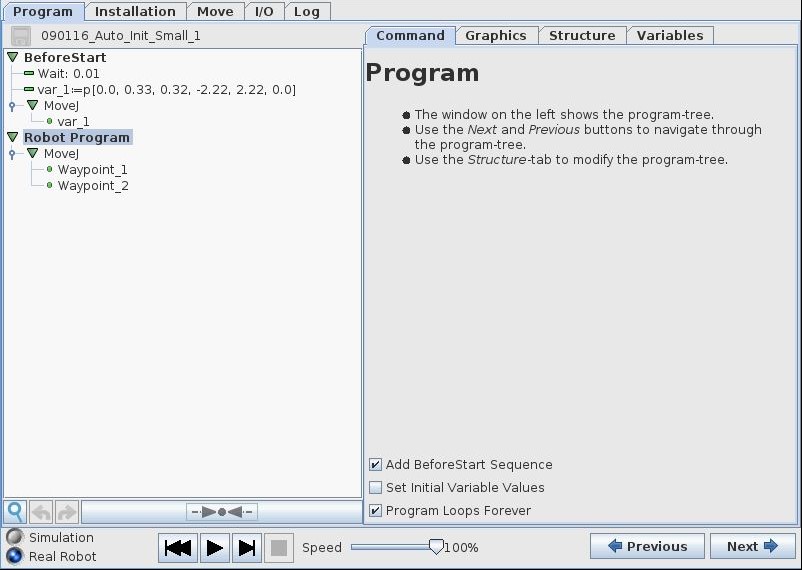
Please notice that depending on how the user program is made the program might not start automatically and still shows the “Auto move screen”. Therefore here is an example where there is a Variable Waypoint in a Before Start routine (The Variable pose value can be at the exact same position as the user program home position).
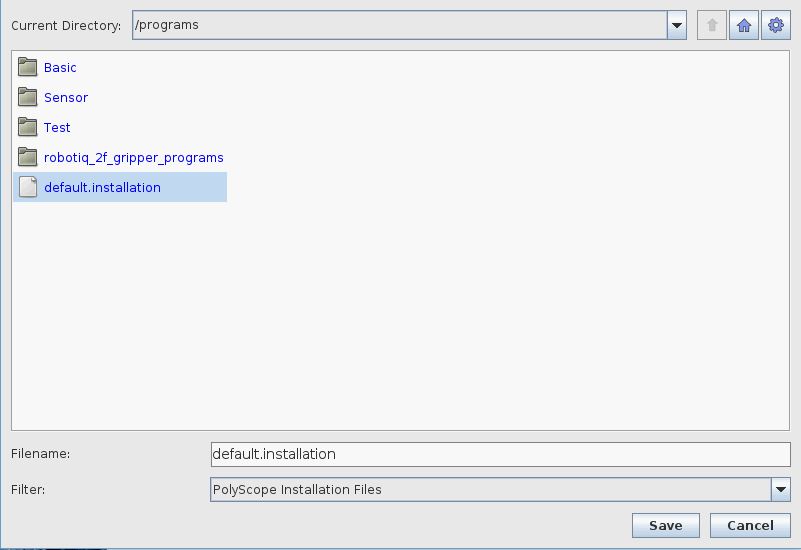
Notice that the default.installation filed is saved two times – once as the programs default.installation file in the same directory as the user program – and also as the robots default.installation file at top level.
The experience is that it is best to have the user program on the robots main file structure for this situation (i.e. not on a USB thumb drive) because the recognition on the USB drive might take some time during boot and then the robot will maybe miss finding the user program file, but if located on the main structure then it can be found early during boot.
Function description:
The settings are configured so if Digital input 0 is True during boot of robot then a Auto initialize will be performed.
And if Digital input 1 is True during boot of robot then a specified default program will be loaded.
Depending of how the user program is made the user program can start automatically if the BeforeStart routine has a variable Waypoint.
I/O table Inputs:
DI0 = Auto Initialize.
DI1 = Load program.
Variable Table:
var_1 = Starting position pose.
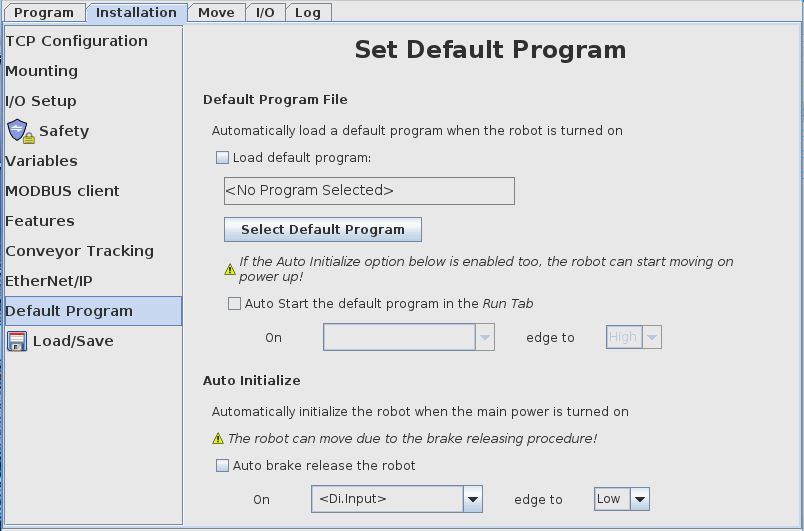
How the “Set Default Program” screen looks like before any configuration.
A default user program file is specified in the file structure.
The inputs are configured for their intended use i.e. Digital 0 is set to trigger a Auto Initialize is True during boot. And Digital 1 is set to trigger to start the program execution.
The default.installation file are saved two times i.e. in the same folder as the user program – and also in the top level of the robot program structure.

Program description:
This small test program is made with a BeforeStart routine that has a variable waypoint and therefore this program can start automatically.
Program code:
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.