Operator input variables:
Application Description:
This article demonstrates how variables can be entered from the touch screen – for example by an operator.
Function description:
This application uses the function of “Operator input” for variables.
I/O table Inputs:
Not used
I/O table Outputs:
Not used.
Variable Table:
Var_1 = Operator input from touch screen.
Program description:
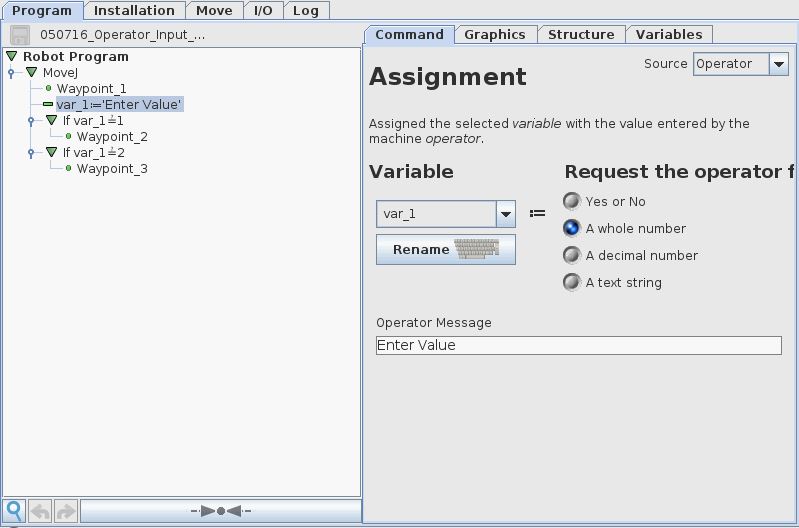
The robot moves to a startion position “waypoint_1” and then the variable “var_1” is given the property as “Operator” in the Command screen. This will prompt a window to popup with an option for entering data on the touch screen – for example by an operator.
The variable is inserted into the program by the “Assignment” option in the “Structure” tab under “Advanced”.
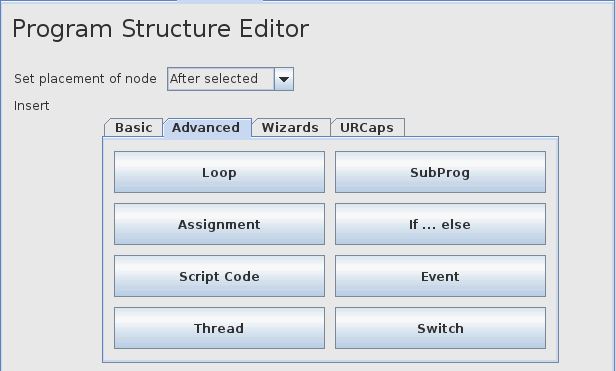
The “Source” for the variable is chosen to be “Operator” (in top right corner) in the command screen.
Two “If” statements are inserted which will use the data entered to take the decision for the next waypoint the robot moves to.
Program code:
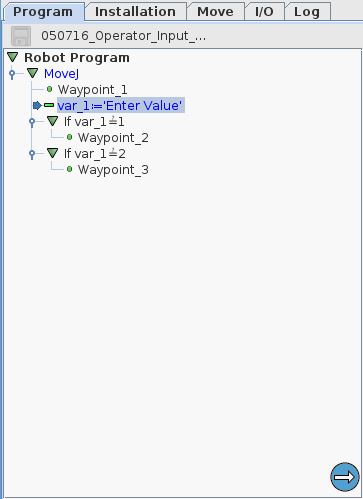
Program run:
A window will popup where a value can be entered – which are used in the program to decide the next action – in this case to move to a specific waypoint according to the data entered and accepted with the green “tick” sign.
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.