UR Files format.
Extracting files to the office computer.
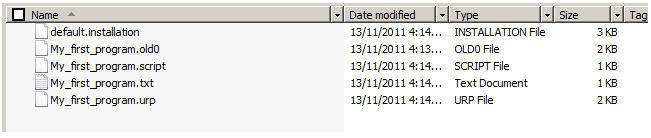
After the user program files have been saved on a USB drive it is very easy to transport them to an office computer for documentation and backup. Just insert the files into your office computer and they are there to be viewed.
Aside from the user files the UR controller also stores the default.intsllation files which are useful if a user program is transferred to another robot that for some reason had a modified default installation file. E.g. another IP address. Then it is very easy to reload the default.installastion file and make the user program run on another robot and.
The controller saves the user program file in three different versions. This is our “My_first_program” as explained in the “Programming” section of this manual.
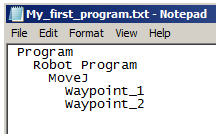
The .txt files contain a simple description of our user program.
My_first_program.txt
The .urp file is a binary file that the UR robot use and is not easy readable.
My_first_program.urp

The .script file is our user program as a script file.
My_first_program.script
def My_first_program():
set_analog_inputrange(0, 0)
set_analog_inputrange(1, 0)
set_analog_outputdomain(0, 0)
set_analog_outputdomain(1, 0)
set_tool_voltage(24)
set_runstate_outputs([])
set_payload(0.0)
set_gravity([0.0, 0.0, 9.82])
while True:
$ 0 “Robot Program”
$ 1 “MoveJ”
$ 2 “Waypoint_1”
movej([-0.7601482324296471, -1.9284112483400442, 2.4200850009312065, -2.13148960204731, -1.562351390833685, -0.9523963238633675], a=1.3962634015954636, v=1.0471975511965976)
$ 3 “Waypoint_2”
movej([-0.7601145807261123, -1.925313457229536, 1.4271208291636501, -1.1406326407517442, -1.5621569587688118, -0.9518539657810257], a=1.3962634015954636, v=1.0471975511965976)
end
end
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.