Spiral Move
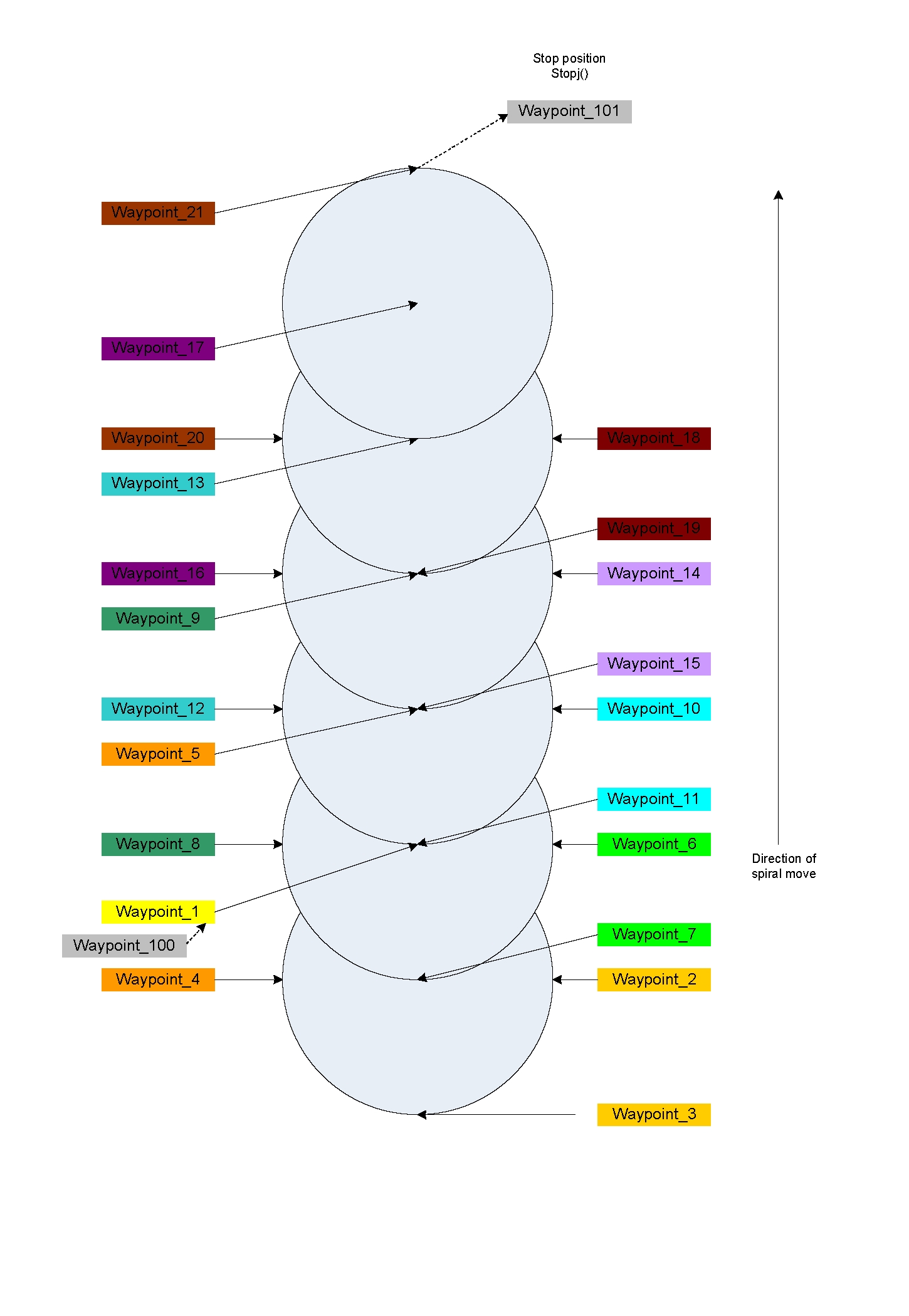
This program example consists of 10 half circles (CircleMove).
The robot starts up and away from the starting of the spiral (waypoint_100) and then move down to starting position (waypoint_1). Notice a CircleMove must always have a starting point which in this case is waypoint_1. The CircleMove itself represents the via point and the end point of the CircleMove.
In this example the transition from one circle to next circle is between the via point and end point of the second half circle e.g. at the transition between waypoint_4 to waypoint_5.
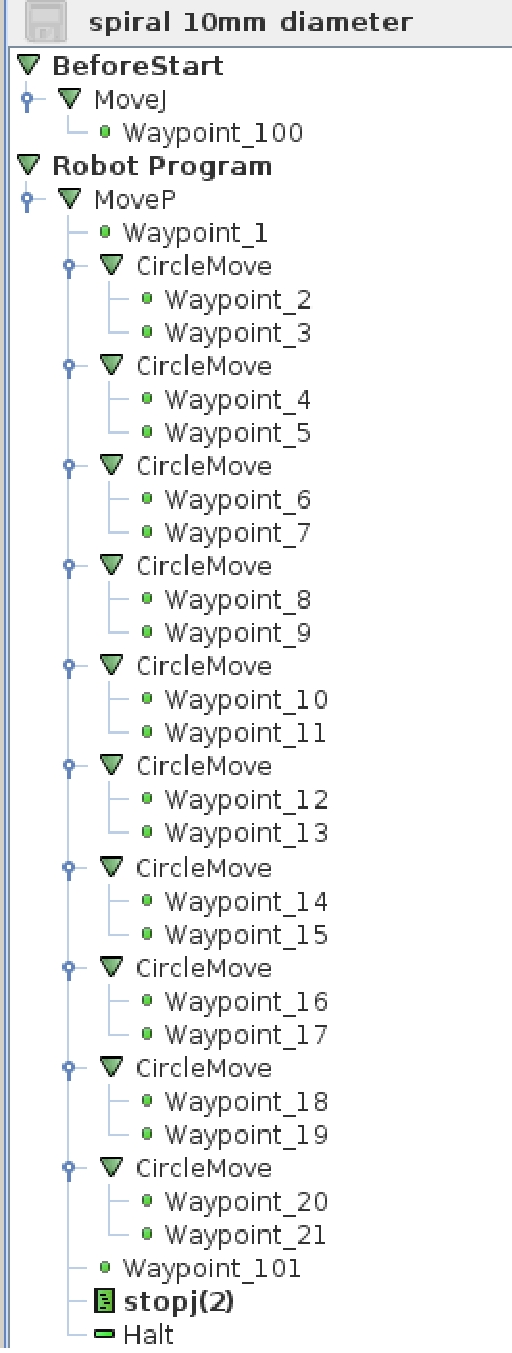
Polyscope Program.
Remarks to the program.
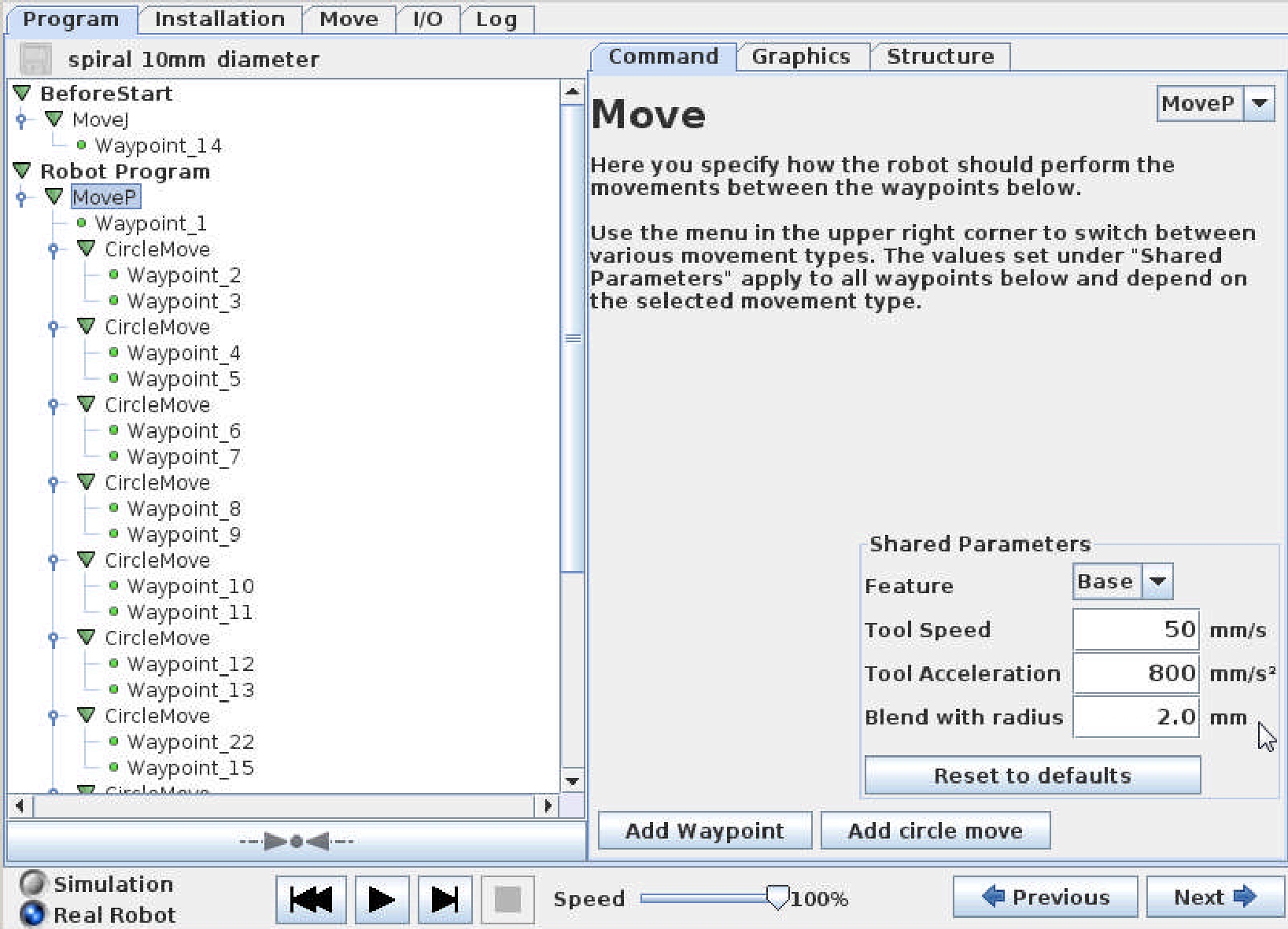
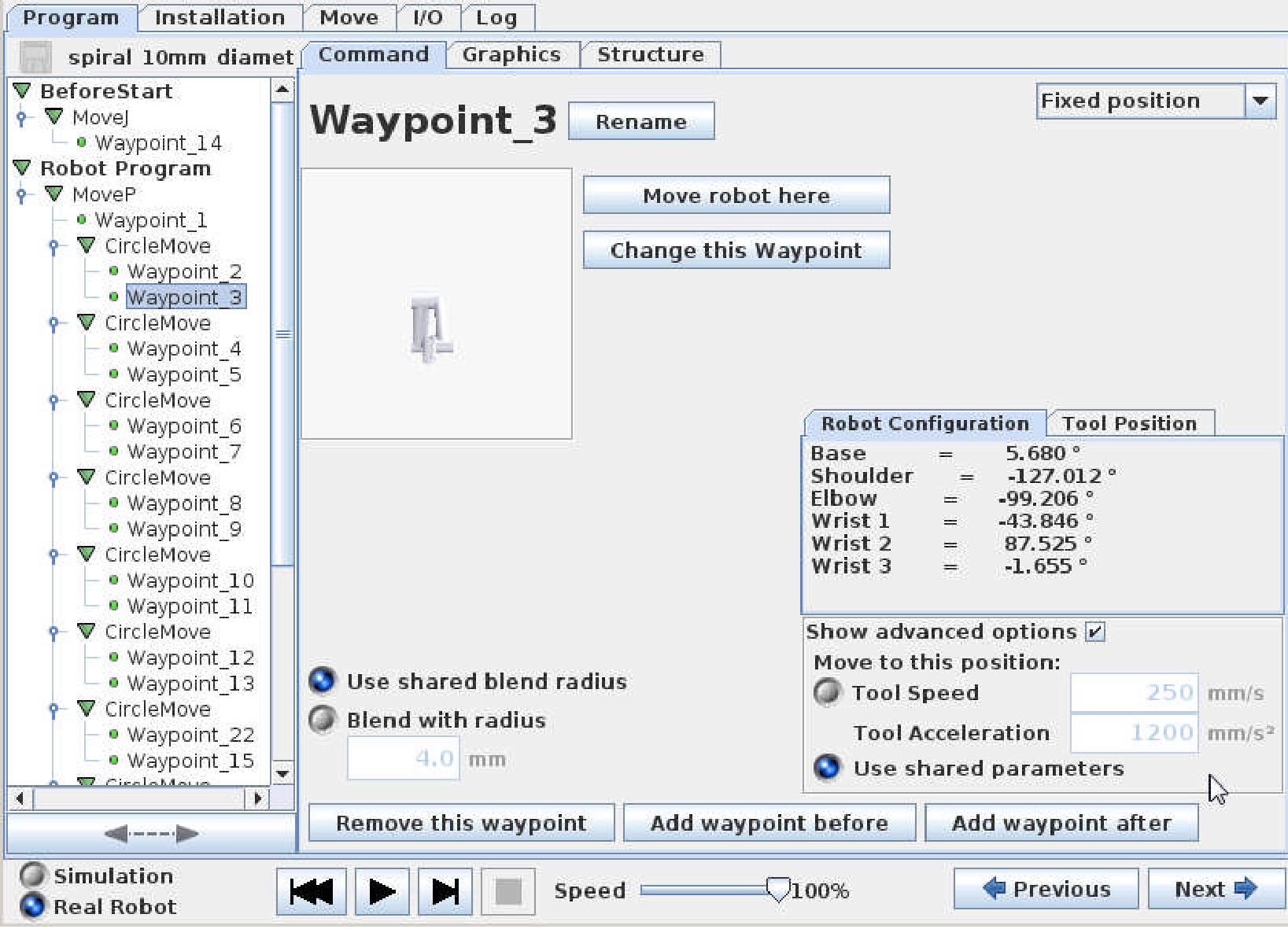
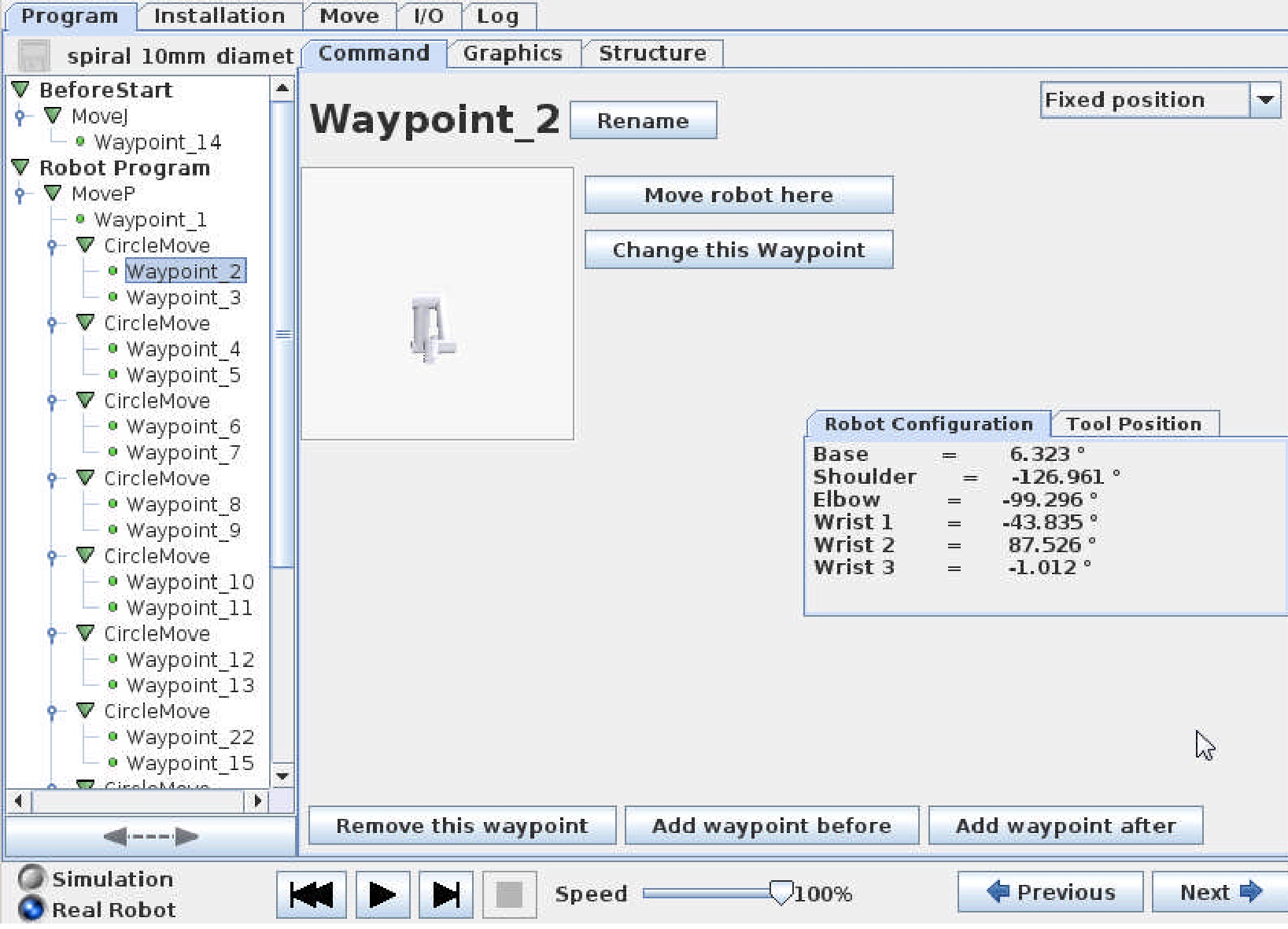
Notice the Blend Radius setting for the overall MoveP property – and the individual Waypoint for the end point of the half circle.
(The via waypoint does not have a Blend property). (Minimum blend radius is 1 mm).
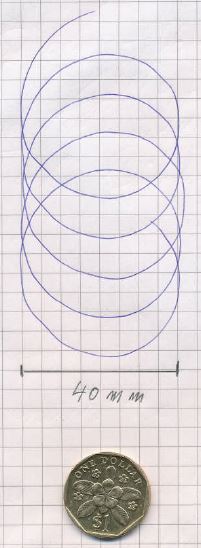
Result – drawn with a pen mounted on a UR5 robot.
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.