Init Variables
In the Program tree – Point on the “Init Variables” line and this screen appear.
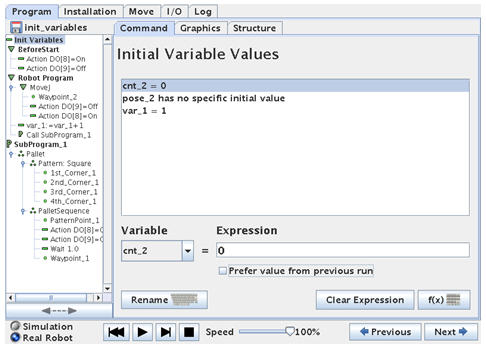
In the centre screen the actual value of the variables are instantly shown and these variables used in the program can be set to an initial value desirable for the main program.
The value can also be set to an expression or to the Value from the last run of the program by ticking the “Preferred value from previous run”. This is especially useful when using the Pattern templates for picking or placing items in an array – and therefore continue from the point from where the robot left from the last program run.
In this case the program comprises of a Pallet Pattern which has variables for the number of transversal positions to keep track of the progress besides a user created variable called “var_1”.
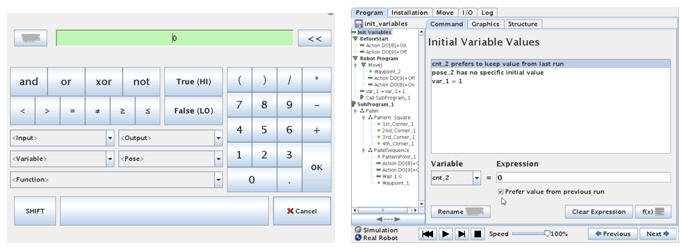
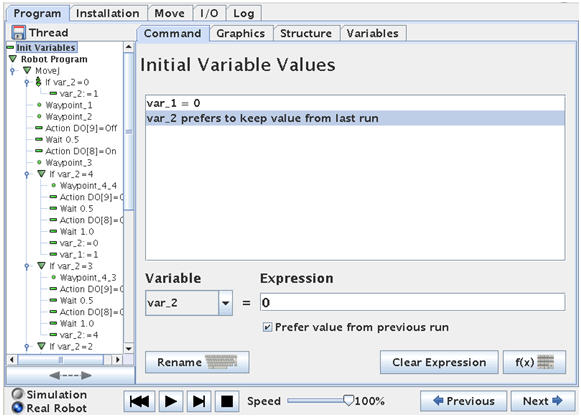
Variables – Prefer to keep value from last run.
Here comes a beautiful function.
So far the robot program will start at position 1 (Waypoint_4_1) every time we start up the Robot program – also is this was after a safety stop.
But in the Init Variables screen there is a feature called ”Prefer value from previous run”. If this one is clicked for the intended variable then the robot can remember which position is next to be delivered to on the conveyor so we do not stack to work piece on top of each other or leaves any location unoccupied.
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.