Pick and place using Robotiq electrical gripper

Application Description:
This article is an example of controlling Robotiq grippers on a Universal-Robots.
This example uses preinstalled Robotiq script files that makes it much easier to control the gripper position and gripper closing and opening force.
Function description:
The electrical gripper is connected to the USB port on the Universal-Robots and is using a Widget provieded by Robotiq with predefined routines.
The USB data signal is converted to RS-485 by an external USD-RS-485 converter.
When the Robotiq files are installed the Robotiq widget show up as “Gripper” and when pressed the gripper control menu appear.

Press “On” symbol to on the gripper.
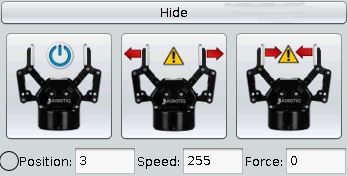
When the gripper is on it can be tested and manipulated with the controls.

I/O table Inputs:
USB
I/O table Outputs:
USB
When using the Robotiq UR kit then there prepared subroutines to open and close and set parameters.
Variable Table:
rq_move(0) (Fully open gripper).
rq_move(255) (Fully close gripper).
rq_force≔255 (Set force at Maximum).
rq_speed≔255 (Set speed at maximum).
Program description:
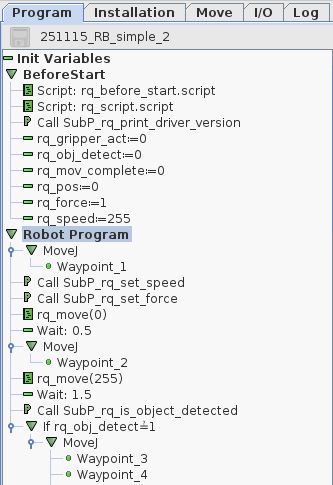
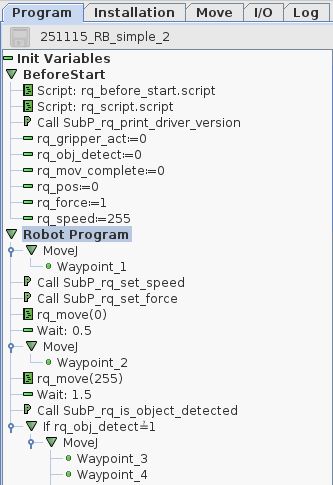
In the “BeforeStart” routine the predefined Robotiq routine is loaded.
Variables are initiated to set values, which are gripper force and gripper speed are set to 255 which is maximum setting.
In the Robot program the robot is moved into a start position and the routine to set the gripper speed is called following a command to fully open the gripper (position 0).
The the robot moves down to waypoint 2 which is a likely position for a object to pick up. When the robot have reached waypoint 2 the command to close the gripper with position 255 which is fully closed, but if there is an object the gripper will stop when an object has been detected.
If the gripper detect an object the the robot will move to waypoint 3. If the gripper does not detect an object then the gripper will move back to waypoint 1 and open the gripper and again try to go to waypoint 2.
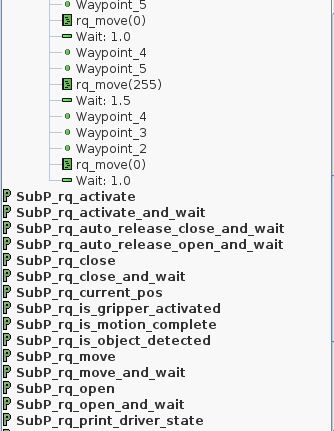
If there is an object in the gripper the robot moves to waypoint 3 which is above the picking position and then the robot moves to waypoint 4 which is above the place position and move down to waypoint 5 which is the place position. At the place position the command to open the gripper is called and the gripper opens. Notice the wait commands which serves the function to allow the gripper to fully open and also close in order to have a good release and a good grip on the object.
When the object is released the robot moves back the path to pickup an new item and the cycle resumes,
Program code:
Disclaimer: While the Zacobria Pte. Ltd. believes that information and guidance provided is correct, parties must rely upon their skill and judgement when making use of them. Zacobria Pte. Ltd. assumes no liability for loss or damage caused by error or omission, whether such an error or omission is the result of negligence or any other cause. Where reference is made to legislation it is not to be considered as legal advice. Any and all such liability is disclaimed.
If you need specific advice (for example, medical, legal, financial or risk management), please seek a professional who is licensed or knowledgeable in that area.
Author:
By Zacobria Lars Skovsgaard
Accredited 2015-2018 Universal Robots support Centre and Forum.